quad
Summary
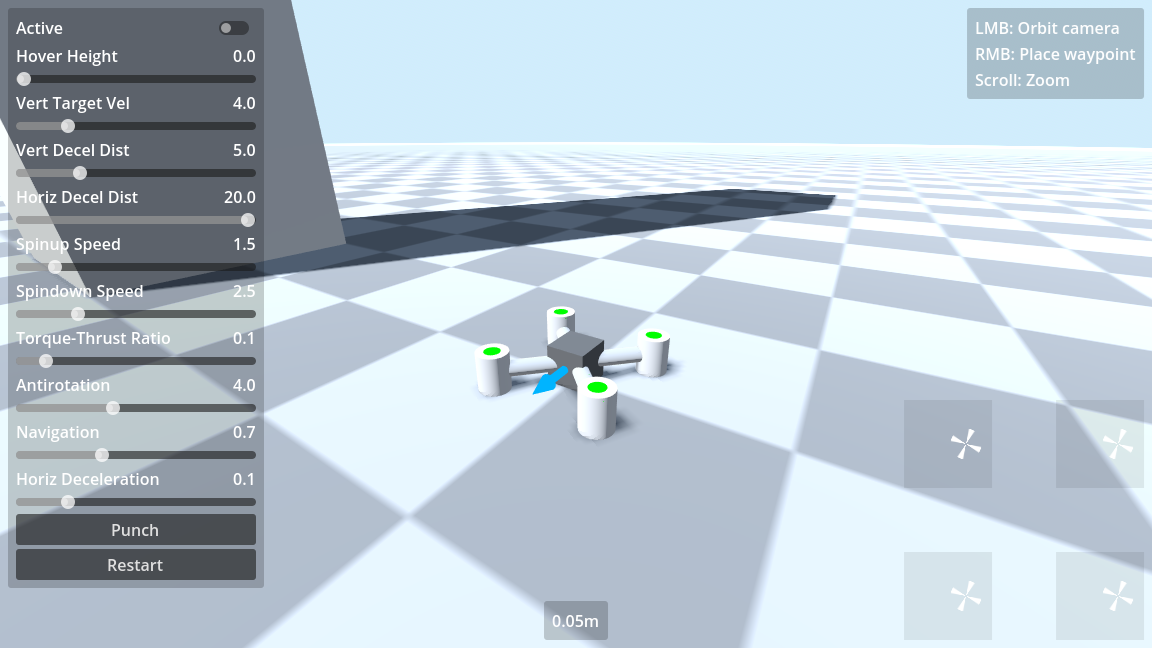
I was inspired by ARC Raiders to make some interesting quadcopter flight behavior. I simulate four rotating propellers that apply local upwards force and torque. The quad uses a simulated accelerometer and GPS to calculate its position, velocity, and orientation. A basic flight controller uses the measurements and calculations to keep itself level, eliminate drift, and navigate to a waypoint. Physical imperfections like propeller motor acceleration, torque, and sensor update frequency were added to make the flight behavior more interesting and realistic.
Controls
Use the left mouse button and drag to orbit the camera.
Use the right mouse button to place a waypoint.
Use the left control panel to activate and configure the quadcopter.
Press Punch to "punch" the quadcopter to see how it tries to resolve itself.
Use R or press Restart to restart the demo.
Leave a comment
Log in with itch.io to leave a comment.